So feiern Roboter an der Uni Weihnachten
Im Jahr 2012 überraschte die Uni Freiburg ihre Newsletterkunden mit einem besonderen, von einem Roboter auf dem Xylophon gespielten, musikalischen Weihnachtsgruß.Wer entwickelte Nao?
Die Studentengruppe um die Junior-Professorin und Informatikerin Dr. Maren Bennewitz ist es, die dem humanoiden Roboter Nao beibrachte, wie er sich in Räumen bewegen und sogar ein Instrument spielen kann. Nano lernte es schneller als ein Mensch. Für seine Programmierung wurden etwa drei Wochen benötigt. Die Idee für das Weihnachtsvideo hatte der Doktorand Daniel Maier und die Studenten, Stefan Band und Jonas Delleske, setzten sie, im Rahmen eines Bachelorprojektes, um.
Jetzt, im Ausklang des Jahres 2012, wird das Projekt von dem Informatikstudenten Ramin Zohouri bearbeitet. Er brachte dem Roboter einen stärkeren Schlag bei, den dieser für den Einsatz bei Spielen gebraucht und er arbeitet an der Bewegungsoptimierung von Nao, die diesem ermöglicht seine Bewegungen selbst zu optimieren,
 Teleoperation eines humanoiden Roboters: Steuer... Teleoperation eines humanoiden Roboters: Steuer... |  NAO Humanoid Robot Obstacle Avoidance Using Mon... NAO Humanoid Robot Obstacle Avoidance Using Mon... |  KOSMOS 620691 Mazzy - Dein smarter App-Roboter,... KOSMOS 620691 Mazzy - Dein smarter App-Roboter,... |
Wie funktioniert Nao?
Die "Augen" von Nao sind zwei Kameras, die, durch ein Funknetzwerk, mit einem Computer verbunden sind. Im Rechner werden die Musikdaten des Weihnachtsliedes auf Tonhöhe und -dauer analysiert und die Armbewegungen entsprechend angepasst. Das bedarf eines genauen "Fingerspitzengefühls". Denn nur mit präzisen Bewegungsbefehlen gelingt es den Roboter so zu steuern, dass er sich im gewünschten Tempo, im richtigen Rhythmus und im passenden Winkel bewegt und die Plättchen auf dem Xylophon gezielt mit den Schlägeln getroffen werden.
Flexible Gelenkbewegungen der Roboter sind möglich
 Nao geht mit dem Xylophon sorgfältig um. Wenn Nao sein Xylophon betätigt, sind seine Bewegungen, die er mit seinen 25 Gelenken ausführen kann, zwar etwas ruckartig, aber präzise und funktional. Er kann, so ist es auf unterschiedlichen Videos zu sehen, ebenfalls Treppen steigen und er ist mit einer Feinmotorik ausgestattet, die es ihm ermöglicht, Schranktüren zu öffnen.
Nao geht mit dem Xylophon sorgfältig um. Wenn Nao sein Xylophon betätigt, sind seine Bewegungen, die er mit seinen 25 Gelenken ausführen kann, zwar etwas ruckartig, aber präzise und funktional. Er kann, so ist es auf unterschiedlichen Videos zu sehen, ebenfalls Treppen steigen und er ist mit einer Feinmotorik ausgestattet, die es ihm ermöglicht, Schranktüren zu öffnen.
Erster Roboter, der Wendeltreppen laufen kann
Zuschauer, die alles das für keine besondere Leistung halten, werden von den Forschern darüber aufgeklärt, dass Bennewitz und ihr Doktorand Armin Hornung zusammen mit Wissenschaftlerinnen und Wissenschaftlern der Universität Bremen, im Sonderforschungsbereich "Spatial Cognition" untersuchten, wie humanoide Roboter in einer mehrstöckigen Umgebung, fehlerfrei navigieren können. Ziel ist es, herauszufinden, wie Menschen und Maschinen, in einer Umgebung, gemeinsam zurechtkommen. Eine besondere Prüfungssituation ist gegeben, wenn der Roboter Wendeltreppen steigen oder auf Rampen laufen soll. Inzwischen bewegt sich Nao auf Rampen so, als laufe er auf ebener Erde. Es ist das abwärts gehen von hohen Stufen, was er noch nicht perfekt beherrscht. Momentan verliert er beim Belasten des herabsteigenden Beines noch leicht das Gleichgewicht, wie die Freiburger Informatikerin erklärt.
Die Schwierigkeiten liegen nicht an der Analyse des Roboters, denn seine eingebauten Sensoren liefern ihm Bilder und Laserdaten, die er gut auswertet. Das dies geschieht sehen die Wissenschaftler daran, dass er in der Lage ist, auch in der Kurve einer Wendeltreppe seine Schritte und Körperdrehung anzupassen.
Roboter werden zum umgehen von Hindernissen programmiert
 Gesunde Menschen wissen auf Anhieb, ohne nachzudenken, wenn sie einen Raum betreten, welche Hindernisse sie vor sich haben und reagieren darauf. Sie neigen zum Beispiel den Kopf bei niedrigen Türrahmen, heben ihre Füße bei Teppichen und Türmatten, weichen Möbelstücken aus. Roboter haben es schwerer als Menschen: Um zum gleichen Erfolg zu kommen, müssen sie "lernen" ihre Umgebung nicht nur wahrzunehmen, sondern zusätzlich Strukturen zu erkennen und zu interpretieren. Dazu benötigt Nao von jedem Raum in dem er funktionieren soll, ein 3D-Modell. Er kann anschließend, anhand der Höhen der Einrichtungsgegenstände und der Formen der Möbel, die von dem Roboter nur als Hindernisse wahrgenommen werden, seinen Weg im und durch den Raum berechnen und dann ausführen.
Gesunde Menschen wissen auf Anhieb, ohne nachzudenken, wenn sie einen Raum betreten, welche Hindernisse sie vor sich haben und reagieren darauf. Sie neigen zum Beispiel den Kopf bei niedrigen Türrahmen, heben ihre Füße bei Teppichen und Türmatten, weichen Möbelstücken aus. Roboter haben es schwerer als Menschen: Um zum gleichen Erfolg zu kommen, müssen sie "lernen" ihre Umgebung nicht nur wahrzunehmen, sondern zusätzlich Strukturen zu erkennen und zu interpretieren. Dazu benötigt Nao von jedem Raum in dem er funktionieren soll, ein 3D-Modell. Er kann anschließend, anhand der Höhen der Einrichtungsgegenstände und der Formen der Möbel, die von dem Roboter nur als Hindernisse wahrgenommen werden, seinen Weg im und durch den Raum berechnen und dann ausführen.
Schwierigkeiten die bei der Programmierung von Nao überwunden werden mussten
Ein Beispiel: Laien, die einen Comic im Fernsehen anschauen, sind oft begeistert und lachen oft über die kleinen Figuren, die rennen, springen, sich freuen können und ihre Miene, je nach Situation, verziehen können. Zuschauer wissen meist nicht, wie viele Bewegungsabläufe studiert und einzeln gezeichnet werden müssen, damit diese dem Betrachter gefallen und Freude machen können.
Ähnlich verhält es sich mit Nao. Auch für jede Aktion die er ausführen soll, muss eine komplexe Bewegungssequenz berechnet werden. Soll er für das Öffnen eines Schrankes programmiert werden, muss zum Beispiel berechnet werden, welchen Abstand er vor dem Schrank halten muss, damit er die Tür öffnen kann. Als nächstes muss bestimmt werden in welcher Geschwindigkeit und wie er seinen Arm bewegt, den Griff erfasst und dann die Türe auf macht. Damit Nao sein Gleichgewicht nicht verliert, müssen gleichzeitig die Knie in einem bestimmten Winkel gebeugt werden.
Auch heute noch wird Nao weltweit eingesetzt – etwa in der Bildung oder Therapie. Die damalige Weihnachtsaktion zeigt, wie emotional Technik sein kann.
Roboter können für Menschen zum Helfer im Alltag werden
Wenn Wissenschaftler wie Maren Bennewitz Roboter entwickeln, überlegen sie auch, wie diese Maschinen Menschen bei ihrer täglichen Arbeit unterstützen können. Computer gesteuerte Roboter haben sich bereits in der Autoindustrie und der Chirurgie einen Namen gemacht. Jetzt können Roboter Schranktüren öffnen in Zukunft sollen sie auch Kinderzimmer aufräumen.
Mikroroboter namens Smartlets mit Kommunikation und Kooperation
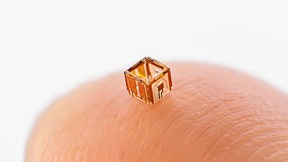 Die Technische Universität Chemnitz hat eine neue Generation von Mikrorobotern namens Smartlets entwickelt. Diese sind nur etwa einen Millimeter groß, autonom und können in wässrigen Umgebungen miteinander kommunizieren und kooperieren.
Die Technische Universität Chemnitz hat eine neue Generation von Mikrorobotern namens Smartlets entwickelt. Diese sind nur etwa einen Millimeter groß, autonom und können in wässrigen Umgebungen miteinander kommunizieren und kooperieren.
Technologie und Aufbau
- Smartlets bestehen aus mehrschichtigen Materialien, die sich origamiartig zu 3D-Würfeln falten.
- Sie enthalten Sensoren, Aktoren, Mikro-LEDs, Fotodioden, Photovoltaikzellen und Mikrochips.
- Eine Kommunikation erfolgt über optische Signale, die lokal verarbeitet werden – ganz ohne externe Steuerung.
Funktion und Verhalten
- Sie bewegen sich durch Gasblasen im Inneren, die Auftrieb erzeugen.
- Smartlets können Lichtsignale empfangen und senden, um Bewegungen und Aktionen zu koordinieren.
- Sie bilden robotische Kollektive, die sich wie digitale Organismen verhalten – mit spezialisierten Rollen wie Wahrnehmung, Kommunikation und Bewegung.
Ihre Zukunft und Anwendung
- Ihre potenziellen Einsatzgebiete sind: Wasserqualitätsüberwachung Medizinische Diagnostik
Biologische Forschung
Soft-Robotik
Verteilte Sensornetzwerke
- Ziel ist die Entwicklung von autonomen, anpassungsfähigen Mikrosystemen, die sich selbst organisieren können.
Mögliche Einsatzszenarien für Smartlets
Für die:
- Überwachung von Wasserqualität in natürlichen Gewässern oder Trinkwassersystemen
- Erkennung von Schadstoffen oder Mikroorganismen in schwer zugänglichen Bereichen
- Minimalinvasive Diagnostik im menschlichen Körper, zum Beispiel in Blutgefäßen oder Organen
- Gezielte Medikamentenabgabe durch programmierte Mikrobewegung und Kommunikation
- Untersuchung von Mikroökosystemen wie Zellkulturen oder Biofilmen
- Simulation biologischer Prozesse durch robotische Kollektive
- Soft-Robotik-Anwendungen, bei denen flexible, adaptive Systeme gefragt sind
- Verteilte Sensornetzwerke, die autonom Daten sammeln und weitergeben
- Autonome Inspektionssysteme für schwer zugängliche oder gefährliche Umgebungen
Zukunftsvisionen für die Anwendung
- Digitale Organismen: Smartlets mit spezialisierten Rollen (zum Beispiel Kommunikation, Bewegung, Wahrnehmung)
- Selbstorganisierende Roboterkolonien, die sich an Umweltbedingungen anpassen
Nao im Festtagsrausch

Portrait der Junior-Professorin Dr. Maren Bennewitz
 Maren Bennewitz studierte Informatik und Wirtschaft an der Universität in Bonn und promovierte im Jahr 2004, mit dem Thema "Mobile Robot Navigation in Dynamic Environments". Seit Oktober 2008 ist sie Junior-Professorin und Leiterin des "Humanoid Robots Lab" am Institut für Informatik, an der Albert-Ludwigs-Universität. Im Projekt "BrainLinks-BrainTools" arbeitet sie, zusammen mit Wolfram Burgard, am Thema: "Gehirn-Maschine-Schnittstellen" und ist an einem Forschungsprojekt zur Bewegungsanalyse von Parkinson- und Epilepsie-Patienten beteiligt.
Maren Bennewitz studierte Informatik und Wirtschaft an der Universität in Bonn und promovierte im Jahr 2004, mit dem Thema "Mobile Robot Navigation in Dynamic Environments". Seit Oktober 2008 ist sie Junior-Professorin und Leiterin des "Humanoid Robots Lab" am Institut für Informatik, an der Albert-Ludwigs-Universität. Im Projekt "BrainLinks-BrainTools" arbeitet sie, zusammen mit Wolfram Burgard, am Thema: "Gehirn-Maschine-Schnittstellen" und ist an einem Forschungsprojekt zur Bewegungsanalyse von Parkinson- und Epilepsie-Patienten beteiligt.


Weihnachten -Gefahren für Katzen und Hunde vermeiden
Tipps von der Veterinärmedizinischen Universität Wien, wie wir unsere Haustiere gesund durch die Feiertage bringen.
Seitan - ein "Festtagsbraten" für Vegetarier
Die Ursprünge von Seitan in Deutschland und eine genaue Anleitung zur Seitan-Herstellung.
Was gehört auf den Weihnachtsteller?
In Deutschland gibt es die Tradition, dass jedes Familienmitglied zu Weihnachten Süßigkeiten auf einem Teller erhält. Hier die klassischen Zutaten die auf ...
Bildquelle:
Monika Hermeling
(Bilanz der Kirchen zum Corona Weihnachten)

